MTK手动空间离散求解PDE
MTK手动空间离散求解PDE
!!! tip
Contents:MTK、PDE、手动空间离散
Contributor: YJY
Email:522432938@qq.com
如有错误,请批评指正。
!!! note
MTK = ModelingToolkit.jl
PDE = Partial Differential Equation
[ModelingToolkit.jl ](https://mtk.sciml.ai/stable/)符号建模包
MTK的PDE求解技巧
在之前介绍的例子中,所有的微分都是基于时间的微分。从数学的角度来说,微分变量只有一个。而对于有多个微分变量的PDE问题,能否通过MTK手动求解呢?例如,对时间对空间微分的PDE问题。
答案是肯定的。
求解PDE的数值方法有这么几步:
- 建立数学描述方程
- 对变量进行离散
- 迭代求解
MTK用法中,提供了基于时间的一条龙求解。至于多变量的PDE,也有对应的PDESystem。但是目前来说,PDESystem还不是很完善。其离散方法涉及NeuralPDE.jl的相关内容。就MTK.jl本身来说,没有打通PDE的建模与求解过程。
所以,使用MTK求解PDE的缺口在于,没有针对其它变量的离散-空间离散。那么,如果我们能够手动完成空间离散,这个问题就解决了。事实上,手动空间离散是可行的。
数值传热学实例
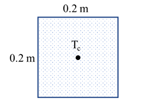
考虑一个正方形铸件的散热过程,正方形铸件初始温度1000℃,环境温度为0℃。如图
传热的控制方程为:
将参数统一在等式右端,即
其中,
——密度,单位为:
——物体热容,单位为:
——导热系数,单位为:
——热扩散系数,单位为:
内部节点空间离散
对方程进行空间离散,采用二阶中心差分,有:
若使用化简表达,
则有内部节点的空间离散:
边边界空间离散
下面考虑边界条件。以W边为例。
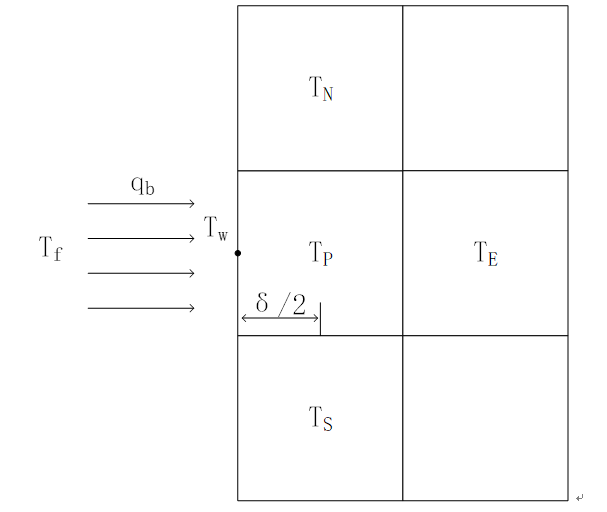
边界条件使用第三类边界条件。
为了消去,考虑该式子的等比式:
!!! note
当对流散热系数h足够大时,,即。第三类边界条件可以近似为第一类边界条件——壁温恒定为环境温度,如下式推导:
$$T_{W}=\frac{h T_{f}+\frac{2 \lambda}{\delta} T_{P}^{n}}{h+\frac{2 \lambda}{\delta}}=\frac{T_{f}+\frac{2 \lambda}{\delta h} T_{P}^{n}}{1+\frac{2 \lambda}{\delta h}} \approx T_f$$
这是从数学上的一种理解,后面并没使用到该近似。
对边界采用附加源法进行分析。为边界点温度,节点的能量守恒方程为:
将式(a)的第三项代入上式中的项并化简,最终能得到边边界的边界方程:
同理可得其它3个边的边边界方程。
角边界空间离散
最后考虑角边界。以铸件左上角为例进行分析,下如图所示的角边界。
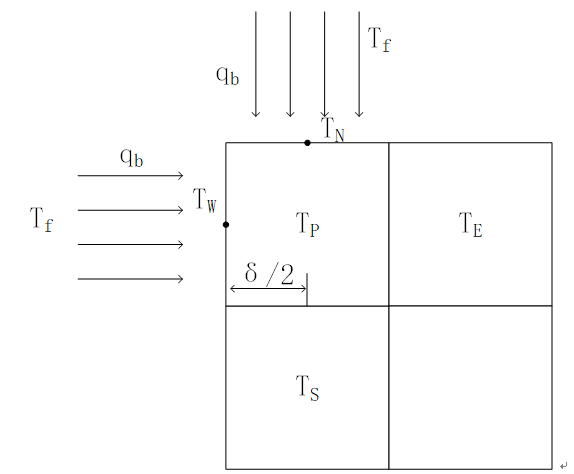
分析方法同边边界的分析方法,最后可得:
离散方程汇总
经过以上推导,得到了内节点表达式、边边界表达式和角边界表达式。为了方便程序表达,对方程的系数进行化简,令,
!!! note
当很大时,,所以。和前面边界条件的理解相似。同样的,这只是一种理解方式,并没有使用。
内节点:
边边界节点:
角边界节点:
求解实例
求解的全部代码如下:
using ModelingToolkit, DifferentialEquations
# 参数设定
a = 1.27E-5
n = 10
L = 0.2
δ = L / n
λ = 50
h = 1.0E9
Tf = 0.0
A = a / δ^2
B = a / (δ^2 / 2 + δ * λ / h)
@variables t (T(t))[1:n, 1:n]
D = Differential(t)
# 内节点代码
insides = [
D(T[i, j]) ~ A * (T[i+1, j] + T[i-1, j] + T[i, j+1] + T[i, j-1] - 4 * T[i, j])
for i in 2:n-1 for j in 2:n-1]
# 边边界代码
Wb = [
D(T[i, 1]) ~ A * (T[i+1, 1] + T[i-1, 1] + T[i, 2]) - (3B + A) * T[i, 1] + B * Tf
for i in 2:n-1
]
Eb = [
D(T[i, n]) ~ A * (T[i+1, n] + T[i-1, n] + T[i, n-1]) - (3B + A) * T[i, n] + B * Tf
for i in 2:n-1
]
Nb = [
D(T[1, i]) ~ A * (T[1, i+1] + T[1, i-1] + T[2, i]) - (3B + A) * T[1, i] + B * Tf
for i in 2:n-1
]
Sb = [
D(T[n, i]) ~ A * (T[n, i+1] + T[n, i-1] + T[n-1, i]) - (3B + A) * T[1, i] + B * Tf
for i in 2:n-1
]
# 4 corner boundary
corner = [
D(T[1, 1]) ~ A * (T[2, 1] + T[1, 2]) - (2B + 2A) * T[1, 1] + 2B * Tf,
D(T[n, n]) ~ A * (T[n-1, n] + T[n, n-1]) - (2B + 2A) * T[n, n] + 2B * Tf,
D(T[n, 1]) ~ A * (T[n, 2] + T[n-1, 1]) - (2B + 2A) * T[n, 1] + 2B * Tf,
D(T[1, n]) ~ A * (T[2, n] + T[1, n-1]) - (2B + 2A) * T[1, n] + 2B * Tf
]
eqs = append!(insides, Wb, Eb, Nb, Sb, corner)
@named sys = ODESystem(eqs, t)
sys = structural_simplify(sys)
# u0 = [1000.0 for i in 1:n for j in 1:n]
u0 = Dict(T[i, j] => 1000.0 for i in 1:n for j in 1:n)
prob = ODEProblem(sys, u0, (0, 100), [], saveat=0.1)
sol = solve(prob, Tsit5())
值得一提的是:
MTK变量定义:
这是有效的变量数组(矩阵)的定义方式,也就是说MTK支持变量数运算。
@variables t (T(t))[1:n, 1:n]
ODESystem定义
ODESystem定义时,既没有传递变量,也没有传递参数,甚至连t也可以不用传递,这都是可行的。ODESystem定义时能够自动检查(check)方程结构,从方程中获得变量信息。
@named sys = ODESystem(eqs, t)
!!! tip
ODESystem定义时,若传递变量数组或者参数数组,check时不能通过。目前来说这是一个bug,所以可以不写。
MTK初值设定
初值或者参数传递时,以下两种方式都可以。但也有区别。在符号计算中,符号在数组中的位置是不确定的。假如以数组的形式传递进去,那么就不知道哪个初值传递给了哪个变量(如果初值或参数都相同那就无所谓)。所以,初值传递需要精确到变量时,最好使用Dict。
u0 = [1000.0 for i in 1:n for j in 1:n]
u0 = Dict(T[i, j] => 1000.0 for i in 1:n for j in 1:n)
saveat
saveat是solution handle中的内容。其作用是使sol中结果存储结果的时间步长为给定步长。
当然,也可以使用sol()获得任意时刻的值。
sol(2.5)
但是这样会丢失变量的顺序,就是无法得知变量与数值的对应关系了。能否解决这个问题,这里还有许多可测试与探索的空间。
可视化
!!! tip
Julia生态中,可视化也是很强的!
[Plots.ji](https://docs.juliaplots.org/dev/)远比想象的强大!
最后,动画走你!
an_len= length(sol[T[1,1]])
using Plots, GR
res = rand(n,n,an_len)
for t in 1:an_len
for i in 1:n
for j in 1:n
res[i,j,t] = sol[T[i,j]][t]
end
end
end
xs = LinRange(0.0, L, n)
ys = LinRange(0.0, L, n)
contourf!(xs, ys, res[:,:,10])
anim = @animate for i ∈ 1:50
contourf!(xs, ys, res[:,:,i])
end
gif(anim, "anim.gif", fps = 24)
物体温度是下降的,在不断散热。