最优控制理论与应用
最优控制理论与应用
!!! tip
Contents:JuMP、Control、EquationsSolver
Contributor: YJY
Email:522432938@qq.com
如有错误,请批评指正。
!!! note
[JuMP](https://jump.dev/JuMP.jl/stable/)是计算优化问题的Julia软件包。
[Symbolics.jl](https://symbolics.juliasymbolics.org/dev/)为符号计算包
[EquationsSolver](https://jake484.github.io/EquationsSolver.jl/)自制的小型方程(组)求解器。
1 问题描述
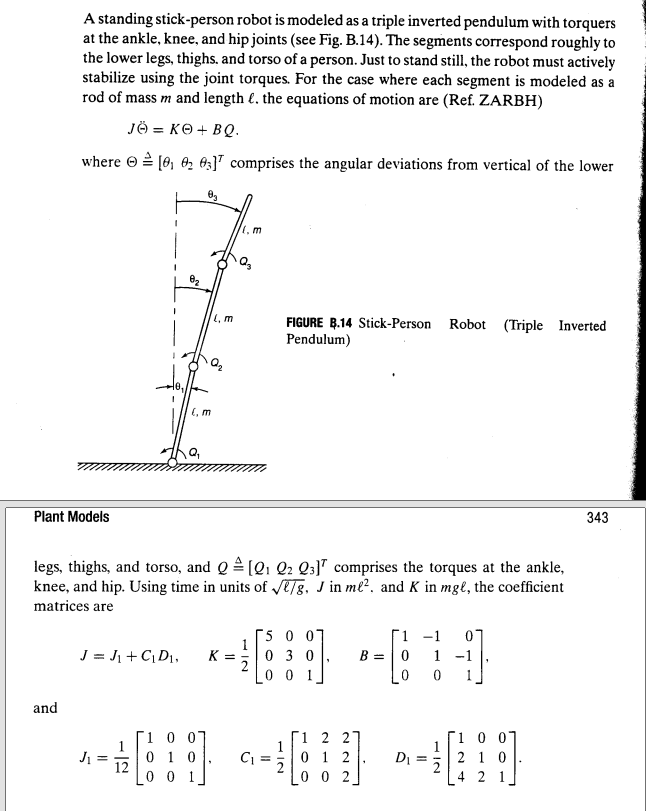
本篇通过一个机器人的控制问题,介绍最优控制的相关理论与求解方式。问题如下:
题目信息总结如下:
- 这是一个含有三个关节的机器人。
- 机器人身体的三部分与垂直方向的夹角分别为。
- 机器人的三个关节能够提供使机器人运动的扭矩:。
- 机器人关节的扭矩与夹角之间的关系(控制方程)为:。
扭矩对夹角的控制方程的推导方法,我们并不关心。知晓它是通过动力学学分析得出即可。
它最重要的信息是揭示了与之间的控制关系。通过该方程,我们可以知道,如果控制量发生了改变,被控量会发生何种变化。控制方程的物理含义是,夹角变化的角加速度与夹角的位置以及关节扭矩相关。具体的系数值见上图所示。
1.1 (最优)控制内涵
从这个问题中,我们可以抽象出“控制”一般性内涵:通过改变控制量来操作被控量。
那么什么是最优控制的内涵呢?
假如,机器人初始状态是斜站着(,弧度制单位),现在要让机器人站直()。我们可以改变关节扭矩。那么问题来了,应该:
- 是否是一个随时间不变的常数?
- 如果是常数,取何值?
- 是否是一个随时间变化的函数?
- 如果是函数,怎样变化?
我们从方程中可以发现,假若对不加限制。只是要机器人站直,那么我可以通过改变,让机器人可以慢慢的站、快快的站、先蹲后站,先躺后站,先俯卧撑再站,先整几个深蹲再站 😃。
最优的含义则体现在这些“限制”里。一般而言,若对控制的效果加以限制,使控制的某种指标最大(最小),则是最优控制。例如,让机器人最快的站直,最省力的站直。在这些“最”的限制下,就不是任意的了(要最快的站直就不能先做个俯卧撑再站,那样就慢了 😃 ),而是仅有一组最符合要求的。在数学上,最符合要求的则是这个最优化问题的解。这就是最优化控制的内涵。
综上,其关键的要素有两点:
- 控制方程
- 控制过程中的最优化目标
在以上2点关键要素之下,最优控制问题的本质是优化问题:
- 优化目标:控制最优化
- 优化约束:控制方程代表的变量约束以及起点终点约束等。
2 状态方程
状态空间方程是控制学中非常重要的一个概念。控制学中,把变量视为状态。其本质还是将数学上的变量赋予了物理含义。状态方程的矩阵形式为:
其特征如下:
- 上述为状态向量
- 上述为系统的输入向量(控制量向量)
- 上述为系统系数矩阵,描述内部量之间的联系。
- 统一以一阶导数的形式描述。
若把机器人的控制方程写成状态方程,则有:
其中,
- 上述代表角速度向量,有三个角速度分量。
- 上述代表角加速度向量,有三个角加速度分量。
- 上述代表扭矩向量,有三个扭矩分量。
如此则统一了控制问题的方程描述。状态方程也好,控制方程也好,其本质是描述系统的方程。它们只是形式上的区别,在数学本质上是一致的。统一为状态方程的好处是,能够对控制问题进行普适性的推导与计算,使得状态方程下的数学推论具有普遍意义。
!!! note
状态方程的定义为:描述系统状态变量与输入变量之间关系的一阶微分方程组,称为系统的状态方程。状态方程表征了系统由输入量引起的内部状态变量的变化情况。
3 最优控制问题解析解
首先,介绍系统一般性数学描述:
系统状态方程
由于状态量都是关于时间的因变量,所以都写成关于时间的函数。
系统始端与终端
系统性能指标
其次,把它写优化问题的数学形式则为:
一般的优化问题的解是数。不同于一般的优化问题,该优化的问题的解是函数。这就涉及到数学中的变分概念。这里不过多介绍,只给结论。
!!! tip
一般最优化问题中,是找到相应的数值使得优化目标最小。最优化控制问题中,是找到相应的控制函数,使得优化目标最小。一个是找数值,一个是找函数。相当于自变量变为了函数。这是泛函分析解决的问题。
3.1 端点固定问题的解法
端点固定问题即的数值确定。
求解析解的方法是拉格朗日乘子法在泛函分析中的体现。首先令,
上式中,称为哈密尔顿函数,为伴随方程。最优控制函数存在的必要条件为:
再结合控制方程与边界方程,则可以解得分析解。
!!! tip
最优控制问题中有多种边界条件。端点固定问题只是其中一种。它们分别为:
1. 终端时刻$t_f$固定,终端向量$x(t_f)$自由
2. 终端时刻$t_f$固定,终端向量$x(t_f)$约束
3. 终端时刻$t_f$自由,终端向量$x(t_f)$约束
在约束中,数值确定是也是约束的一种。不同的边界条件,添加不同的边界方程,在此不过多介绍,有兴趣可以翻看《最优控制理论》。
4 机器人控制问题求解实例
机器人问题的状态方程为:
设优化目标如下,可以理解为最省力的站直方式。因为其物理含义是时间域上的扭矩平方和最小。
可以得到哈密尔顿方程为:
代入解析解存在的必要条件:
4.1 SymPy求状态方程解析解
化简伴随方程,结合控制方程,可以得到:
为了求得上述问题的解析解,采用SymPy。SymPy是基于python的符号计算包,其开发了julia的调用接口。
using SymPy
@syms t A B λ() x() #定义函数及符号变量
diffeq = Eq(λ(t).diff(t, 2), A * λ(t)) # 定义需要求解的方程
λt = dsolve(diffeq, λ(t)).__pyobject__.rhs # 求解得到λ
ut = -1//2 * B * λt # 计算得到u
diffeq2 = Eq(x(t).diff(t, t), A * x(t) + B * ut)# 定义关于x(t)的微分方程
dsolve(diffeq2, x(t)) # 求解
!!! warning
在上述代码中,0.5需要用1//2,这样才能求得解析解,否则会报错。因为0.5是浮点数。
得到结果如下:
即:
同时,对进行求导,得到。
dsolve(diffeq2, x(t)).__pyobject__.rhs.diff(t)
即:
这里一共有4个未知数:,通过4个边界调节确定:
4个边界方程则可解出4个未知数。实际上是4个向量,每个向量分别对应机器人三部分的参数。在求解时,实际上是12个变量。
!!! note
也可以通过SymPy直接求解微分方程组。能获得同样的结果。julia using SymPy @syms t A B λ1() x1() λ2() x2() eqs = [ Eq(λ1(t).diff(t), -A * λ2(t)), Eq(λ2(t).diff(t), -λ1(t)), Eq(x1(t).diff(t), x2(t)), Eq(x2(t).diff(t), A * x1(t) - B^2 / 2 * λ2(t)) ] dsolve(eqs)
4.2 参数矩阵求解
下面介绍如何在Julia生态高效计算4个未知数。
需要运用符号处理包——Symbolics.jl。该包在MTK的"前世今生"已经介绍过。本篇中也会用到。
using Symbolics, EquationsSolver, LinearAlgebra
# ==========================functions==================== #
function initPara()
J1 = 1.0 / 12 * collect(I(3))
C1 = 0.5 * [1 2 2; 0 1 2; 0 0 2]
D1 = 0.5 * [1 0 0; 2 1 0; 4 2 1]
J = J1 + C1 * D1
K = 0.5 * [5 0 0; 0 3 0; 0 0 1]
B = [1 -1 0; 0 1 -1; 0 0 1]
A = inv(J) * K
B = inv(J) * B
return A, B
end
function x1(A, B, t, C1, C2, M1, M2)
A = sqrt(A)
B = inv(A) * B * B / 4
s = -(B * t) .* exp.(A * t) .* C1
s = s .+ exp.(A * t) .* M1
s = s .+ (B * t) .* exp.(-A * t) .* C2
s = s .+ exp.(-A * t) .* M2
return s
end
function x2(A, B, t, C1, C2, M1, M2)
A = sqrt(A)
B = B * B / 4
s = (-B * t .* C1 .+ A * M1 .- inv(A) * B * C1) .* exp.(A * t)
s = s .+ (-B * t .* C2 .- A * M2 .+ inv(A) * B * C2) .* exp.(-A * t)
return s
end
function SolvePro(eqs, init, vars)
pro = NLProblem(eqs, init)
res = solve(pro)
return [reshape([res[var[i]] for i in 1:3], (3, 1)) for var in vars]
end
function condition(θfields, A, B, tfields, C1, C2, M1, M2)
res = x1(A, B, tfields[1], C1, C2, M1, M2)
eqs = [res[i] ~ θfields[1][i] for i in 1:3]
res = x1(A, B, tfields[2], C1, C2, M1, M2)
append!(eqs, [res[i] ~ θfields[2][i] for i in 1:3])
res = x2(A, B, tfields[1], C1, C2, M1, M2)
append!(eqs, [res[i] ~ θfields[3][i] for i in 1:3])
res = x2(A, B, tfields[2], C1, C2, M1, M2)
append!(eqs, [res[i] ~ θfields[4][i] for i in 1:3])
return eqs
end
function Problem(A, B, θfields, tfields)
vars = @variables C1[1:3] C2[1:3] M1[1:3] M2[1:3]
C1, C2, M1, M2 = [reshape(collect(var), 3, 1) for var in vars]
eqs = condition(θfields, A, B, tfields, C1, C2, M1, M2)
init = Dict(var[i] => 0.0 for var in vars for i in 1:3)
return SolvePro(eqs, init, vars)
end
# ==========================main==================== #
A, B = initPara()
# 分别为x1(0) x1(t) x2(0) x2(t)的边界值
θfields = [[π / 3, -π / 4, π / 2], [0, 0, 0], [0, 0, 0], [0, 0, 0]]
tfields = (fill(0.0, 3, 1), fill(1.0, 3, 1))
N = 100
C1, C2, M1, M2 = Problem(A, B, θfields, tfields)
t = (0, 1)
degrees = [x1(A, B, fill(i, 3, 1), C1, C2, M1, M2) for i in range(t[1], t[2], length=N)]
velocity = [x2(A, B, fill(i, 3, 1), C1, C2, M1, M2) for i in range(t[1], t[2], length=N)]
!!! warning
SolvePro()中,等含有除以矩阵的式子,在编写时都要写为左乘的逆矩阵。这是由数学含义决定的,否则结果错误。
上述代码的核心思想为:将符号计算与数字计算在形式上统一。核心为函数x1()与x2()。其便捷性在于,若把符号矩阵作为传递给x1(),则x1()计算结果为符号矩阵,若传递数值,则计算结果为数值解。
符号计算解参数:
function SolvePro(eqs, init, vars)
pro = NLProblem(eqs, init)
res = solve(pro)
return [reshape([res[var[i]] for i in 1:3], (3, 1)) for var in vars]
end
function condition(θfields, A, B, tfields, C1, C2, M1, M2)
res = x1(A, B, tfields[1], C1, C2, M1, M2)
eqs = [res[i] ~ θfields[1][i] for i in 1:3]
res = x1(A, B, tfields[2], C1, C2, M1, M2)
append!(eqs, [res[i] ~ θfields[2][i] for i in 1:3])
res = x2(A, B, tfields[1], C1, C2, M1, M2)
append!(eqs, [res[i] ~ θfields[3][i] for i in 1:3])
res = x2(A, B, tfields[2], C1, C2, M1, M2)
append!(eqs, [res[i] ~ θfields[4][i] for i in 1:3])
return eqs
end
function Problem(A, B, θfields, tfields)
vars = @variables C1[1:3] C2[1:3] M1[1:3] M2[1:3]
C1, C2, M1, M2 = [reshape(collect(var), 3, 1) for var in vars]
eqs = condition(θfields, A, B, tfields, C1, C2, M1, M2)
init = Dict(var[i] => 0.0 for var in vars for i in 1:3)
return SolvePro(eqs, init, vars)
end
- 在
Problem()函数中,定义了12个未知数。 - 将符号作为参数传递给
condition()并通过其构建待求解方程。如果兴趣可以在函数中Print待求解方程结果。 - 通过
SolvePro()调用EquationsSolver方程求解器求解。
最终可得到12个参数的结果
数字计算算结果:
在计算出4个参数向量后,SolvePro()经过结果处理返回参数向量值,再调用x1()与x2()时,则能够得到各时间点的数值。具体的操作方式如下:
t = (0, 1)
degrees = [x1(A, B, fill(i, 3, 1), C1, C2, M1, M2) for i in range(t[1], t[2], length=N)]
velocity = [x2(A, B, fill(i, 3, 1), C1, C2, M1, M2) for i in range(t[1], t[2], length=N)]
在调用x1()与x2()时,不过是传递了不同的参数,就能得到不同结果的类型。传递符号就计算符号,传递数值就计算数值。符号与数值本在数学形式上是一致的,在Julia中则完美地实现了这一点!
4.3 解析解可视化
degrees = real.(degrees)
velocity = real.(velocity)
using Plots
filename = "./a.gif"
len = 1
anim = @animate for i in 1:N
strings = "t=$(i/N*(t[2]-t[1])+t[1]) "
strings *= "v₁=" * string(round.(velocity[i][1], digits=2))
strings *= " v₂=" * string(round.(velocity[i][2], digits=2))
strings *= " v₃=" * string(round.(velocity[i][3], digits=2))
l = collect(0:0.01:len)
xs1 = l .* sin(degrees[i][1])
ys1 = l .* cos(degrees[i][1])
xs2 = l .* sin(degrees[i][2]) .+ xs1[end]
ys2 = l .* cos(degrees[i][2]) .+ ys1[end]
xs3 = l .* sin(degrees[i][3]) .+ xs2[end]
ys3 = l .* cos(degrees[i][3]) .+ ys2[end]
plot([xs1, xs2, xs3], [ys1, ys2, ys3],
ylims=(0, 4), xlims=(-3, 3), w=3,
grid=false, showaxis=false, legend=false,
title=strings)
end
gif(anim, filename, fps=24)
上面的实例计算的是机器人初态为的情况。动图如下:
机器人初态为的情况:
机器人初态为的情况:
5 数值解
该问题使用数值解则很好解决,优化问题使用JuMP则迎刃而解。
5.1 求解方法
首先看一个示例:
using JuMP, LinearAlgebra, Ipopt, Statistics
θ = [π / 3, -π / 4, π / 2]
θ = [π / 18, π / 6, π / 4]
θ = [π / 3, π / 4, π / 5]
N = 100
tf = 4.0
#---------------------------------------------#
function initPara()
J1 = 1.0 / 12 * collect(I(3))
C1 = 0.5 * [1 2 2; 0 1 2; 0 0 2]
D1 = 0.5 * [1 0 0; 2 1 0; 4 2 1]
J = J1 + C1 * D1
K = 0.5 * [5 0 0; 0 3 0; 0 0 1]
B = [1 -1 0; 0 1 -1; 0 0 1]
A = inv(J) * K
B = inv(J) * B
return A, B
end
A, B = initPara()
model = Model(Ipopt.Optimizer)
@variables(model, begin
-π / 2 <= x1[1:N, 1:3] <= π / 2
x2[1:N, 1:3]
-10 <= u[1:N, 1:3] <= 10
end)
initzeros = zeros(3)
for j in 1:3
@NLconstraint(model, x1[1, j] == θ[j])
@NLconstraint(model, x2[1, j] == initzeros[j])
@NLconstraint(model, x1[N, j] == initzeros[j])
@NLconstraint(model, x2[N, j] == initzeros[j])
end
for i in 1:N-1
a1 = x1[i, :] + (x2[i+1, :] + x2[i, :]) * 0.5 * tf / N
a2 = x2[i, :] + (A * (x1[i+1, :] + x1[i, :]) + B * (u[i+1, :] + u[i, :])) * 0.5tf / N
for j in 1:3
@NLconstraint(model, x1[i+1, j] == a1[j])
@NLconstraint(model, x2[i+1, j] == a2[j])
end
end
@NLobjective(model, Min, sum(20 / π * x1[i, j]^2 + u[i, j]^2 for i in 1:N-1 for j in 1:3))
JuMP.optimize!(model)
degrees = JuMP.value.(x1)
velocity = JuMP.value.(x2)
using Plots
filename = "./u_x_a4.gif"
len = 1
anim = @animate for i in 1:N
strings = "Numerical t=$(i/N*tf) "
strings *= "v₁=" * string(round(velocity[i, 1], digits=2))
strings *= " v₂=" * string(round(velocity[i, 2], digits=2))
strings *= " v₃=" * string(round(velocity[i, 3], digits=2))
l = collect(0:0.01:len)
xs1 = l .* sin(degrees[i, 1])
ys1 = l .* cos(degrees[i, 1])
xs2 = l .* sin(degrees[i, 2]) .+ xs1[end]
ys2 = l .* cos(degrees[i, 2]) .+ ys1[end]
xs3 = l .* sin(degrees[i, 3]) .+ xs2[end]
ys3 = l .* cos(degrees[i, 3]) .+ ys2[end]
plot([xs1, xs2, xs3], [ys1, ys2, ys3],
ylims=(0, 4), xlims=(-3, 3), w=3,
grid=false, showaxis=false, legend=false,
title=strings)
end
gif(anim, filename, fps=24)
该示例包含了求解与可视化,有如下特征:
- 时间采样数(离散数)为:
N = 100; - 调节时间为:
tf = 4; - 优化变量(扭矩、角度)有范围限制;
- 终端对速度也有约束;
- 状态方程作为优化问题的约束,约束不同时刻的状态量之间的关联(不同时间的角度值为不同优化变量。角度状态,角速度状态,扭矩状态各有3N个)。状态方程变为离散结构,因为一旦涉及到数值解,必定是离散化的。离散的方式是二阶的梯形法;
- 优化目标为
!!! tip
离散的概念有两种理解,一种为问题性质上的理解,即问题本身具有离散性质。另外一种是方法上的理解,即求解问题的过程中对于连续问题采用了离散化的方式。
问题性质的离散,是变量本身的一种状态或特性,如开关状态的0与1是独立的状态,本身具有不连续的特性。
而离散化是对于连续问题的求解方式。问题本身是连续的,但是为了使用数值计算方法求得数值解,需要取“连续”中的一些相互间隔的“离散”点来代表“连续”。例如,微分方程的数值解法欧拉法的步长则是具有“连续”性质的离散。微分方程的数值解法,一定是离散化的方法——在时间域上选取一定步长间隔的点求解。
这两者都可以认为是离散问题,而离散化的方法决定了数值计算的精度以及求解的计算量。从方法的层面说,数值计算本身就是离散问题,对于使用计算机进行数值求解来说,不存在连续求解方法。
对于以上6点,先不做说明,可以先看一些结果。
情况一
- 优化目标:;
- 参数:
N = 100,tf = 1; - 末速度限制为0;变量无约束。
- 初态为
情况二
- 优化目标:;
- 参数:
N = 100,tf = 1; - 末速度无限制;变量无约束。
- 初态为
情况三
- 优化目标:;
- 参数:
N = 100,tf = 1; - 末速度限制为0;变量无约束。
- 初态为
情况四
- 优化目标:;
- 参数:
N = 100,tf = 2; - 末速度限制为0;变量范围限制:。
- 初态为
情况五
- 优化目标:;
- 参数:
N = 100,tf = 4; - 末速度限制为0;变量范围限制:。
- 初态为
5.2 对比分析
情况一(站直且速度为零)与情况二(站直速度任意)为不同边界约束的结果。情况一确实不如情况二“迅猛”,情况一的机器人有些拘束,情况二的动作则一气呵成,因为约束少了。同时,情况一的解析解与数值解结果,机器人动作非常神似。
情况一(最省力)、情况三(距离最短)与情况五(省力也要距离短)为不同优化条件的结果。可以看出来情况五综合了情况一个和情况二的优点。同时,情况五前面的系数目的是为了平衡优化的效果——将角度值与速度值置于同一量级,即加大省距离的权重。这类似于机器学习的正则化。其实他们在内涵上有相通之处,通过权重规定了对不同优化目标的“重视程度”!
情况三与情况四的不同之处在于控制量的范围约束与调节时间限制。在数学上来说,不管给定何种始终条件,若控制量u不限制,则一定能完成控制任务(优化问题有解)。所以在条件4的控制量约束下,若是设tf=1,则在求解时找不到最优解,唯有把时间放款才能在控制量约束下找到解。这非常符合实际,控制量不能无限大,控制过程也需要时间。
事实上,也可以通过解析解来验证这些结论,但解析解的代码量太大,不如数值解来得方便 😃 。例如,同时考虑与的解析解结果为 😃:
总结
由机器人的最优控制问题,介绍最优问题的解析解与数值解。从两方面基本上已经诠释了最优控制的内涵。即,为了某种目标去找到一组最合适的控制量。事实上,这只是控制的第一步,计算结果都是静态的。接下来还需要根据实际的系统反馈进行时间域上的滚动优化,滚动起来后,就能够利用系统的反馈,实现了真正意义上的控制——对反馈的处理与计算。
另外,从整个机器人问题求解的过程也可以看出Julia生态的强大之处。当问题清楚之后,灵活使用Julia生态的各种软件包,能方便快捷地计算出结果。事实上,最优控制问题的底层数学形式为两种——求解类问题(解析解)与优化类问题(数值解)。同时,符号计算使得编写代码方便快捷。这三者恰恰是Julia计算的长处。所以Julia处理最优控制问题,可以用两个词来形容——丝滑、顺畅。